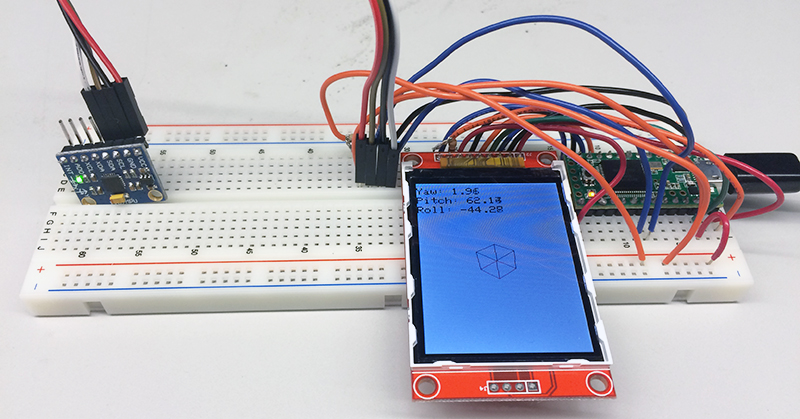
Setup showing rotating cube based on the readings from the IMU
Setup showing rotating cube based on the readings from the IMU
The problem: Stabilizing excavators on the field takes about 10 seconds and sometimes in the wrong conditions, it may not even be possible to stabilize them manually.
The concept: An accelemoter/gyroscope combination will be connected to the engines to auto-stabilize the excavator super quickly and with a precision of +- 1 degree.
The solution: The first prototype of this project is shown in the photo and video below. A cube is being rotated in realtime with the roll, yaw & pitch from the MPU6050. Quaternions are used instead of raw data to avoid Gimbal lock and to ensure that calculations are quick and cheap.